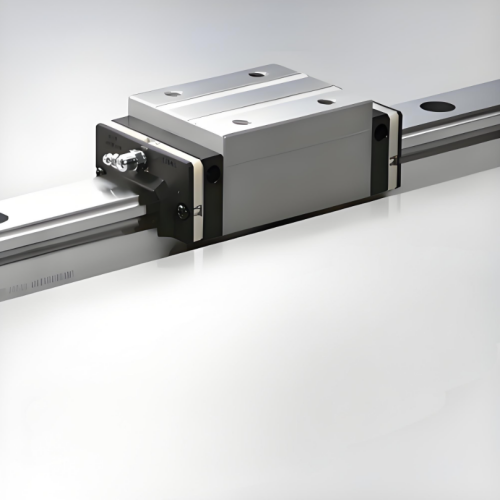
交叉滚子导轨的热变形源于滚动体与滚道间的摩擦生热。当导轨以60m/min以上速度运行时,滚动体与滚道的接触应力可达500MPa,摩擦系数虽低至0.002-0.005,但持续摩擦仍会使导轨温升超过15℃。以某数控机床Z轴导轨为例,其连续运行8小时后,导轨中段温升达18℃,导致线性定位误差从±0.005mm扩大至±0.012mm,直接影响工件表面粗糙度。
热变形与导轨结构存在耦合效应。交叉滚子导轨的V型滚道设计虽提升了刚性,但也导致热量在滚道接触区集中。实验数据显示,导轨滚道接触区的温升比非接触区高40%,这种非均匀温升会引发导轨弯曲变形,使导轨面产生0.02-0.05mm的隆起,进一步加剧定位误差。
主动补偿通过传感器实时监测导轨温度场分布,结合数学模型预测热变形量,再通过CNC系统修正运动指令。某半导体设备厂商开发的智能导轨系统,在导轨关键位置嵌入12个PT100温度传感器,每50ms采集一次温度数据,结合有限元分析建立的热变形预测模型,可在0.1秒内完成补偿计算,使晶圆检测设备的定位重复性提升至±0.003mm。
被动补偿通过优化导轨结构与材料特性降低热变形影响。例如,采用陶瓷滚子替代钢制滚子,可使导轨热膨胀系数降低60%,在100℃温升下,导轨长度变化量从0.12mm降至0.05mm。某航天光学遥感器调焦机构采用碳纤维复合材料导轨基体,其热导率仅为钢的1/5,有效抑制了热量向非接触区的传导,使导轨热变形均匀性提升35%。
混合补偿结合润滑与冷却技术,从源头减少热量产生并加速热量散失。某龙门加工中心采用油雾润滑与液冷导轨的复合方案,油雾润滑使导轨摩擦系数降低40%,液冷系统则将导轨温升控制在8℃以内。实测数据显示,该方案使导轨热变形量从0.08mm降至0.02mm,大型模具加工的曲面精度误差减少70%。
在工业机器人领域,交叉滚子导轨的热变形补偿需兼顾动态刚度与运动灵敏性。某六轴机器人关节采用“预紧力动态调节+温度反馈补偿”方案,通过扭矩传感器实时监测关节负载,结合温度数据动态调整预紧力,使末端执行器的定位重复性达到±0.01mm,同时将空载运行噪音降至55dB以下。
对于长行程应用,导轨的热变形补偿需解决热膨胀累积问题。某12米长龙门加工中心采用分段式交叉滚子导轨,每3米设置一个刚性支撑点,配合温度补偿算法,使导轨在连续工作8小时后的热变形量控制在0.02mm以内,确保大型模具加工的直线度误差≤0.005mm/m。
随着智能制造的发展,交叉滚子导轨的热变形补偿技术正向智能化方向演进。通过嵌入压电陶瓷传感器与主动控制算法,系统可实时监测振动频谱并动态调整补偿参数。同时,陶瓷滚子、碳纤维复合材料等新材料的应用,使导轨在保持高刚性的同时,热变形量降低50%以上,为航空航天、半导体制造等高端领域提供更精准的传动解决方案。

扫一扫关注我们





 2025-11-27
2025-11-27