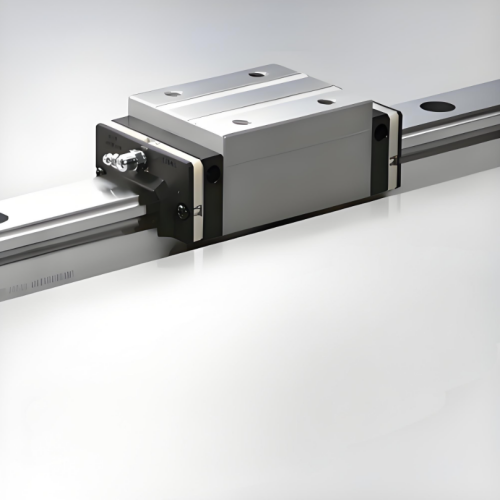
自动化传送系统常需实现三维空间内的复杂轨迹运动,传统导轨因结构限制易产生运动耦合,导致轨迹偏差。交叉滚子导轨通过以下设计实现运动解耦:
正交滚子排列:采用X/Y轴滚子呈90°交叉布置,使各轴运动互不干扰。例如,某半导体封装设备通过此设计,在0.1mm间距芯片搬运中,X/Y轴定位误差从±5μm降至±1.2μm。
高刚性导轨基体:选用航空铝合金(如7075-T6)经精密加工,其弹性模量达71GPa,配合预紧力调节机构,使导轨在多向载荷下变形量小于0.01mm/kN,为运动解耦提供基础支撑。
独立驱动模块:为每个运动轴配置伺服电机与高精度编码器,通过EtherCAT总线实现纳秒级同步控制。某3C产品组装线采用该方案后,多轴联动轨迹重复性提升至±0.05mm,较传统同步带传动精度提高8倍。
自动化设备运行中,温度波动、机械振动等因素易引发动态误差。交叉滚子导轨通过集成传感器与算法实现动态补偿:
多参数监测系统:在导轨滑块内嵌入温度传感器、加速度计与激光位移传感器,实时采集运动状态数据。例如,某汽车零部件检测设备通过该系统,可监测0.01℃级温度变化对导轨热变形的影响。
误差预测模型:基于机器学习算法,建立导轨运动误差与温度、载荷、速度的映射关系。某物流分拣系统通过该模型,将动态误差预测准确率提升至92%,为实时修正提供数据基础。
前馈补偿控制:将预测误差提前输入伺服驱动器,通过调整电机输出扭矩实现轨迹修正。测试数据显示,该技术可使高速运动(≥1m/s)下的轨迹跟踪误差从±0.2mm降至±0.03mm。
为进一步提升多向协同效率,交叉滚子导轨系统正引入AI与数字孪生技术:
自适应控制算法:通过强化学习训练控制器,使其可根据负载变化自动调整预紧力与润滑参数。某精密加工中心采用该算法后,导轨摩擦系数波动范围从0.005缩小至0.001,能耗降低18%。
数字孪生仿真:构建导轨系统的虚拟模型,在虚拟环境中优化运动参数。某光伏组件生产线通过数字孪生技术,将多轴联动调试时间从72小时缩短至8小时,产能提升25%。
远程运维平台:集成IoT模块实现导轨状态云端监测,通过大数据分析预测维护周期。某食品包装设备制造商通过该平台,将导轨故障率从年12次降至2次,维护成本降低60%。
交叉滚子导轨的多向运动协同控制,是机械设计、传感器技术、AI算法的深度融合。从运动解耦到动态补偿,再到智能控制,技术创新不断突破自动化传送系统的精度与效率边界。随着柔性制造、智能工厂的普及,交叉滚子导轨将成为连接“物理世界”与“数字世界”的关键枢纽,为工业升级提供核心动力。

扫一扫关注我们





 2025-11-27
2025-11-27