INAl: ; --univer-tw-slashed-zero: ; --univer-tw-numeric-figure: ; --univer-tw-numeric-spacing: ; --univer-tw-numeric-fraction: ; --univer-tw-ring-inset: ; --univer-tw-ring-offset-width: 0px; --univer-tw-ring-offset-color: #fff; --univer-tw-ring-color: rgba(147,197,253,.5); --univer-tw-ring-offset-shadow: 0 0 transparent; --univer-tw-ring-shadow: 0 0 transparent; --univer-tw-shadow: 0 0 transparent; --univer-tw-shadow-colored: 0 0 transparent; --univer-tw-blur: ; --univer-tw-brightness: ; --univer-tw-contrast: ; --univer-tw-grayscale: ; --univer-tw-hue-rotate: ; --univer-tw-invert: ; --univer-tw-saturate: ; --univer-tw-sepia: ; --univer-tw-drop-shadow: ; --univer-tw-backdrop-blur: ; --univer-tw-backdrop-brightness: ; --univer-tw-backdrop-contrast: ; --univer-tw-backdrop-grayscale: ; --univer-tw-backdrop-hue-rotate: ; --univer-tw-backdrop-invert: ; --univer-tw-backdrop-opacity: ; --univer-tw-backdrop-saturate: ; --univer-tw-backdrop-sepia: ; --univer-tw-contain-size: ; --univer-tw-contain-layout: ; --univer-tw-contain-paint: ; --univer-tw-contain-style: ; scrollbar-color: auto; scrollbar-width: none; padding: 0px; -webkit-font-smoothing: antialiased; font-family: PingFangSC-Semibold; list-style: none; margin: 14px 0px 18px; color: rgb(13, 13, 13); font-size: 20px; line-height: 30px; border: none; text-wrap-mode: wrap; background-color: rgb(255, 255, 255);">一、结构集成化:空间优化与刚性强化
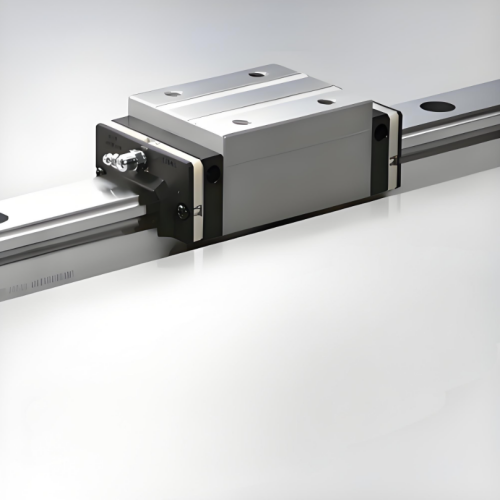
滚珠花键与同步带的联动设计需突破传统分体式布局的局限。以THK BNS系列滚珠花键丝杆为例,其将滚珠丝杠与花键轴集成于单一轴体,通过螺母内部的滚珠循环结构传递轴向力,同时借助外圈花键槽与同步带轮啮合实现扭矩输出。这种设计使旋转与直线运动在同轴线上精准耦合,重复定位精度达±0.005mm,较传统分体式方案安装空间减少40%,刚性提升3倍。
在机器人关节应用中,采用中空式滚珠花键轴可实现内部走线,配合同步带轮的轻量化设计(如铝合金材质),使关节总质量降低25%,运动惯量减小18%,从而提升动态响应速度。例如,某六轴机器人通过优化滚珠花键与同步带的传动比,实现末端执行器0.1秒内完成180°旋转与50mm直线位移的复合动作。
二、动力匹配:扭矩与转速的协同优化
同步带作为动力传输媒介,其选型直接影响系统效率。以HIWIN上银FBR型复合滚珠花键为例,其同步带轮需根据花键轴的额定扭矩(如320N·m)选择H型重载带型,配合12齿小带轮与24齿大带轮的组合,实现2:1的减速比,既满足高速旋转需求(12000rpm),又通过增大包角(≥180°)提升传动稳定性。
在动力分配层面,需通过扭矩传感器实时监测滚珠花键的负载状态,动态调整同步带张紧力。例如,在风电变桨系统中,当风速超过12m/s时,控制系统自动将同步带预紧力从500N提升至800N,防止因振动导致的跳齿现象,同时通过滚珠花键的预压结构(0.005mm鼓形量)补偿热变形误差,确保±0.02mm的定位精度。
三、精度控制:多维度误差补偿机制
滚珠花键与同步带的联动精度受多种因素影响,需建立多层级补偿体系:
几何误差补偿:采用三坐标测量仪检测花键轴与同步带轮的同轴度,通过激光对中仪将偏差控制在0.01mm以内,避免因偏心导致的周期性振动。
热误差补偿:在高速运行工况下(如加工中心主轴),通过集成温度传感器监测滚珠花键轴向温升(通常≤15℃),结合有限元分析模型,预调同步带轮的轴向位置,抵消热膨胀引起的传动间隙。
动态刚度优化:针对冲击载荷场景(如冲压设备),选用45°接触角的滚珠花键,其径向刚度较30°接触角提升50%,同时采用双面齿同步带(DI型)增强抗扭转能力,使系统固有频率远离工作频段(如避开200-500Hz共振区)。
四、典型应用案例:激光切割机的Z轴驱动
某激光切割机采用滚珠花键与同步带的联动设计实现Z轴高速运动:
传动链:伺服电机→同步带(带型8M,节距12.7mm)→滚珠花键轴(直径40mm,导程10mm)→激光头;
性能指标:空载加速度达2g,定位精度±0.01mm,重复定位精度±0.003mm;
创新点:通过优化同步带轮齿形(圆弧齿)与滚珠花键滚道螺旋角(15°),实现旋转360°时激光头直线位移精确控制在0.5mm,满足微米级切割需求。
结语
滚珠花键与同步带的联动设计是机械传动领域的前沿技术,其核心在于通过结构集成化、动力匹配智能化、精度控制多维化,实现传动系统的高效协同。随着工业4.0对设备智能化、高适应性的要求提升,未来该技术将向轻量化(如陶瓷基复合材料应用)、模块化(标准接口设计)、数字化(内置传感器监测)方向演进,为精密制造提供更强大的动力解决方案。






 2026-03-05
2026-03-05