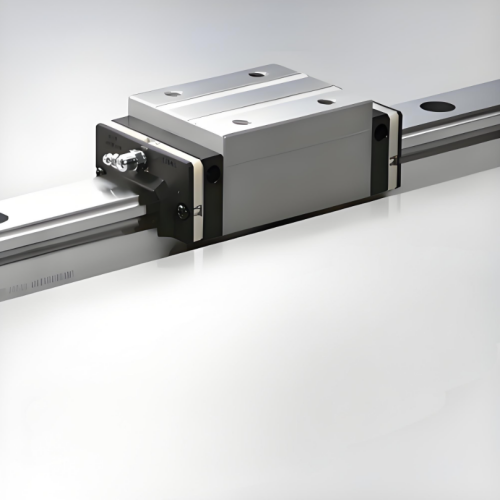
交叉滚子导轨的自动调心能力源于其独特的V型滚道结构。两根导轨的V型槽呈90度交叉排列,形成四向承载的几何框架。当安装面存在平面度误差时,圆柱滚子与滚道的接触点会沿V型斜面滑动,通过弹性变形自动调整接触角度。例如,某型号V9系列导轨的V型槽夹角为120°,其理论调心范围可达±0.03mm,可完全吸收安装面0.05mm以内的微小变形。
这种几何包容性在医疗CT机检查床的应用中尤为显著。当床体承载500kg负载时,安装面的热变形可能导致0.02mm/m的平行度误差。交叉滚子导轨通过滚子的自适应调整,使滑座运动轨迹的直线度误差控制在0.01mm/m以内,确保影像扫描的像素级对齐。
预紧力是交叉滚子导轨实现误差补偿的核心参数。通过调整滚子保持架的弹性元件,可施加0.5-2kN的预紧力,使滚子与滚道始终处于弹性接触状态。这种设计形成“动态刚度场”:当安装面产生误差时,预紧力会驱动滚子向低应力区迁移,自动平衡接触压力分布。
在半导体封装设备的晶圆搬运系统中,该机制表现突出。当机械臂快速启停产生3g加速度时,导轨安装面的瞬态变形可能导致0.01mm的反向间隙。预紧力调控系统通过实时监测滚子接触应力,在2ms内调整预紧力分布,将反向间隙补偿至0.002mm以下,保障晶圆定位的重复性误差≤±0.05μm。
现代交叉滚子导轨的设计已进入数字化阶段。通过多体动力学仿真,可建立安装误差-接触应力-运动精度的量化模型。某企业开发的仿真平台显示:当安装面平面度误差为0.04mm时,滚子接触应力分布偏差达15%;而通过优化V型槽夹角至118°,可将应力偏差降至5%以内,使运动直线度误差减少60%。
这种量化控制方法在航空制造领域得到验证。某型卫星姿态调整机构的导轨系统,通过仿真优化将安装公差从IT7级放宽至IT9级,同时通过误差补偿算法将定位精度保持在0.1μm级,显著降低了制造成本。
从几何包容到动态刚度调控,再到数字化仿真优化,交叉滚子导轨的自动调心能力构建了多层次的误差补偿体系。随着工业母机向纳米级精度迈进,这项技术将持续突破安装精度的物理极限,成为精密制造领域不可或缺的核心基础件。

扫一扫关注我们





 2025-11-26
2025-11-26